|
|
|
@@ -0,0 +1,270 @@ |
|
|
|
\documentclass[uebung]{../../../lecture} |
|
|
|
|
|
|
|
\author{Leon Burgard, Christian Merten} |
|
|
|
\title{Einführung in die Numerik: Übungsblatt 6} |
|
|
|
|
|
|
|
\usepackage[]{gauss} |
|
|
|
\usepackage{blkarray, bigstrut} |
|
|
|
|
|
|
|
\begin{document} |
|
|
|
|
|
|
|
\punkte |
|
|
|
|
|
|
|
\begin{aufgabe} |
|
|
|
\begin{itemize} |
|
|
|
\item |
|
|
|
Berechnung der LU-Zerlegung. Es ist |
|
|
|
\begin{align*} |
|
|
|
PA = \begin{gmatrix}[p] -2 & 6 & 3 & 10 \\ |
|
|
|
0 & -4 & 10 & \frac{15}{2} \\ |
|
|
|
2 & -6 & 7 & -\frac{11}{2} \\ |
|
|
|
-2 & 10 & -12 & 0 |
|
|
|
\rowops |
|
|
|
\add{0}{2} |
|
|
|
\add[-1]{0}{3} |
|
|
|
\end{gmatrix} |
|
|
|
\sim |
|
|
|
\begin{gmatrix}[p] |
|
|
|
-2 & 6 & 3 & 10 \\ |
|
|
|
0 & -4 & 10 & \frac{15}{2} \\ |
|
|
|
0 & 0 & 10 & \frac{9}{2} \\ |
|
|
|
0 & 4 & -15 & -10 |
|
|
|
\rowops |
|
|
|
\add{1}{3} |
|
|
|
\end{gmatrix} |
|
|
|
\\\sim |
|
|
|
\begin{gmatrix}[p] |
|
|
|
-2 & 6 & 3 & 10 \\ |
|
|
|
0 & -4 & 10 & \frac{15}{2} \\ |
|
|
|
0 & 0 & 10 & \frac{9}{2} \\ |
|
|
|
0 & 0 & -5 & -\frac{5}{2} |
|
|
|
\rowops |
|
|
|
\add[\frac{1}{2}]{2}{3} |
|
|
|
\end{gmatrix} |
|
|
|
\sim |
|
|
|
\begin{gmatrix}[p] |
|
|
|
-2 & 6 & 3 & 10 \\ |
|
|
|
0 & -4 & 10 & \frac{15}{2} \\ |
|
|
|
0 & 0 & 10 & \frac{9}{2} \\ |
|
|
|
0 & 0 & 0 & -\frac{1}{4} |
|
|
|
\end{gmatrix} |
|
|
|
=: U |
|
|
|
.\end{align*} |
|
|
|
$L$ ergibt sich durch die Faktoren der Zeilenoperationen, also |
|
|
|
\begin{align*} |
|
|
|
L = \begin{pmatrix} 1 & 0 & 0 & 0 \\ |
|
|
|
0 & 1 & 0 & 0 \\ |
|
|
|
-1 & 0 & 1 & 0 \\ |
|
|
|
1 & -1 & -\frac{1}{2} & 1\end{pmatrix} |
|
|
|
.\end{align*} |
|
|
|
Damit folgt |
|
|
|
\begin{align*} |
|
|
|
PA = LU = |
|
|
|
\begin{pmatrix} 1 & 0 & 0 & 0 \\ |
|
|
|
0 & 1 & 0 & 0 \\ |
|
|
|
-1 & 0 & 1 & 0 \\ |
|
|
|
1 & -1 & -\frac{1}{2} & 1\end{pmatrix} |
|
|
|
\begin{gmatrix}[p] |
|
|
|
-2 & 6 & 3 & 10 \\ |
|
|
|
0 & -4 & 10 & \frac{15}{2} \\ |
|
|
|
0 & 0 & 10 & \frac{9}{2} \\ |
|
|
|
0 & 0 & 0 & -\frac{1}{4} |
|
|
|
\end{gmatrix} |
|
|
|
.\end{align*} |
|
|
|
\item Es ist |
|
|
|
\[ |
|
|
|
\text{det}(PA) = \text{det}(LU) = \text{det}(L) \text{det}(U) = -20 |
|
|
|
\implies \text{det}(A) = - \frac{20}{\text{det}(P) } = 20 |
|
|
|
.\] |
|
|
|
Es ist zunächst $\tilde{e}_1 = P e_1 = e_2$, $\tilde{e}_2 = P e_2 = e_1, \tilde{e}_3 = P e_3 = e_3$ und |
|
|
|
$\tilde{e}_4 = P e_4 = e_4$. Damit folgt durch Vorwärtseinsetzen in $Ly_i = \tilde{e}_i$: |
|
|
|
\begin{align*} |
|
|
|
y_1 = \begin{pmatrix} 0 \\ 1 \\ 0 \\ 1 \end{pmatrix}, |
|
|
|
y_2 = \begin{pmatrix} 1 \\ 0 \\ 1 \\ -\frac{1}{2} \end{pmatrix}, |
|
|
|
y_3 = \begin{pmatrix} 0 \\ 0 \\ 1 \\ \frac{1}{2} \end{pmatrix}, |
|
|
|
y_4 = \begin{pmatrix} 0 \\ 0 \\ 0 \\ 1 \end{pmatrix} |
|
|
|
.\end{align*} |
|
|
|
Und durch Rückwärtseinsetzen in $R x_i = y_i$ folgt |
|
|
|
\begin{align*} |
|
|
|
x_1 = \begin{pmatrix} - \frac{541}{20} \\ -\frac{13}{4} \\ \frac{9}{5} \\ -4 \end{pmatrix}, |
|
|
|
x_2 = \begin{pmatrix} \frac{271}{20} \\ \frac{7}{4} \\ -\frac{4}{5} \\ 2 \end{pmatrix}, |
|
|
|
x_3 = \begin{pmatrix} -\frac{49}{4} \\ -\frac{5}{4} \\ 1 \\ -2 \end{pmatrix}, |
|
|
|
x_4 = \begin{pmatrix} -\frac{263}{10} \\ -3 \\ \frac{9}{5} \\ -4\end{pmatrix} |
|
|
|
.\end{align*} |
|
|
|
Die $x_i$ sind die Spalten von $A^{-1}$, also folgt direkt |
|
|
|
\begin{align*} |
|
|
|
A^{-1} |
|
|
|
= |
|
|
|
\begin{pmatrix} |
|
|
|
-\frac{541}{20} & \frac{271}{20} & -\frac{49}{4} & -\frac{263}{10} \\ |
|
|
|
-\frac{13}{4} & \frac{7}{4} & -\frac{5}{4} & -3 \\ |
|
|
|
\frac{9}{5} & - \frac{4}{5} & 1 & \frac{9}{5} \\ |
|
|
|
-4 & 2 & -2 & -4 |
|
|
|
\end{pmatrix} |
|
|
|
.\end{align*} |
|
|
|
Damit folgt direkt |
|
|
|
\begin{align*} |
|
|
|
Ax = b \implies x = A^{-1}b = \begin{pmatrix} 1 \\ 2 \\ 3 \\ 4 \end{pmatrix} |
|
|
|
.\end{align*} |
|
|
|
\item Für die Kondition gilt nach VL |
|
|
|
\begin{align*} |
|
|
|
\text{cond}_{\infty}(A) = \Vert A \Vert_{\infty} \Vert A^{-1} \Vert_\infty |
|
|
|
= 24 \cdot 79 \frac{3}{20} = 1899 \frac{3}{5} |
|
|
|
.\end{align*} |
|
|
|
\end{itemize} |
|
|
|
\end{aufgabe} |
|
|
|
|
|
|
|
\begin{aufgabe} |
|
|
|
Sei $T$ wie in der Aufgabe gegeben mit $bc > 0$. |
|
|
|
\begin{enumerate}[(a)] |
|
|
|
\item Es gilt |
|
|
|
\[ |
|
|
|
(v_{k})_i = \nu^{i} \sin\left( i \frac{k \pi}{n+1} \right) |
|
|
|
.\] Es sei außerdem $(v_{k})_{0} = (v_{k})_{n+1} = 0$. Damit folgt |
|
|
|
\[ |
|
|
|
(Tv_k)_i = c (v_{k})_{i-1} + a (v_k)_{i} + b (v_{k})_{i+1} |
|
|
|
.\] |
|
|
|
Es gilt außerdem |
|
|
|
\begin{align} |
|
|
|
b \nu^{i+1} = b \frac{c^{\frac{i}{2} + \frac{1}{2}}}{b^{\frac{i}{2} + \frac{1}{2}}} |
|
|
|
= \frac{c^{\frac{i}{2} + \frac{1}{2}}}{b^{\frac{i}{2} - \frac{1}{2}}} |
|
|
|
= c \frac{c^{\frac{i}{2} - \frac{1}{2}}}{b^{\frac{i}{2} - \frac{1}{2}}} = c \nu^{i-1} |
|
|
|
.\end{align} |
|
|
|
Weiter ist |
|
|
|
\begin{salign*} |
|
|
|
(\lambda_k v_k)_{i} |
|
|
|
&= \left[a + 2b \nu \cos \left( \frac{k\pi}{n+1} \right) \right] |
|
|
|
\nu^{i} \sin\left( i \frac{k\pi}{n+1} \right) \\ |
|
|
|
&= a \nu^{i} \sin\left( i \frac{k\pi}{n+1} \right) |
|
|
|
+ 2b\nu^{i+1} \cos\left( \frac{k\pi}{n+1} \right) \sin\left( i \frac{k\pi}{n+1} \right) \\ |
|
|
|
&\stackrel{\text{nützl. Formel}}{=} |
|
|
|
a (v_{k})_i + b \nu^{i+1} \sin\left( (i+1) \frac{k\pi}{n+1} \right) |
|
|
|
+ b \nu^{i+1} \sin\left( (i-1) \frac{k\pi}{n+1} \right) \\ |
|
|
|
&\stackrel{\text{(1)}}{=} a (v_{k})_i + b (v_{k})_{i+1} + c (v_k)_{i-1} |
|
|
|
.\end{salign*} |
|
|
|
Damit folgt |
|
|
|
\[ |
|
|
|
(T v_k)_i = (\lambda_k v_k)_i \implies T v_k = \lambda_k v_k |
|
|
|
.\] Also $v_k$ Eigenvektoren zu EW $\lambda_k$. Da $T \in \R^{n \times n}$, sind |
|
|
|
die $n$ Eigenwerte $\lambda_k$ alle Eigenwerte von $T$. |
|
|
|
\item Beh.: $\text{cond}_2(T) = \mathcal{O}(n^2)$. |
|
|
|
\begin{proof} |
|
|
|
Für $a = 2$ und $b = c = -1$ ist $T$ symmetrisch. Außerdem gilt für die Eigenwerte |
|
|
|
von $T$: |
|
|
|
\[ |
|
|
|
\lambda_k = 2 -2 \cos\left( \frac{k \pi}{n+1} \right) |
|
|
|
.\] Es gilt für $k = 1,\ldots, n$: |
|
|
|
\[ |
|
|
|
0 < \frac{k \pi}{n+1} < \pi \implies \left| \cos\left( \frac{k\pi}{n+1} \right) \right| |
|
|
|
< 1 \implies \lambda_k > 0 |
|
|
|
.\] Also ist $T$ positiv definit. Es gilt weiter |
|
|
|
\begin{align*} |
|
|
|
\min_{1 \le k \le n} \cos\left( \frac{k\pi}{n+1} \right) |
|
|
|
&= \cos\left( \frac{n \pi}{n+1}\right) \\ |
|
|
|
\max_{1 \le k \le n} \cos\left( \frac{k \pi}{n+1} \right) &= |
|
|
|
\cos\left( \frac{\pi}{n+1} \right) |
|
|
|
.\end{align*} |
|
|
|
Damit folgt |
|
|
|
$\lambda_{\text{min}}(T) = \lambda_{1} = 2 - 2 \cos\left( \frac{\pi}{ n+1} \right) $ |
|
|
|
und $\lambda_{\text{max}}(T) = \lambda_{n} = 2 - 2 \cos\left( \frac{n \pi}{ n+1} \right) $. |
|
|
|
Da $T$ symmetrisch und positiv definit gilt also |
|
|
|
\begin{align*} |
|
|
|
\text{cond}_2(T) = \frac{\lambda_{\text{max}}(T)}{\lambda_{\text{min}}(T)} |
|
|
|
= \frac{ 1 - \cos\left( \frac{n\pi}{n+1} \right) }{1 - \cos\left( \frac{\pi}{n+1} \right) } |
|
|
|
\le |
|
|
|
\frac{2}{1 - \cos\left( \frac{\pi}{n+1} \right) } |
|
|
|
.\end{align*} |
|
|
|
Für $\frac{\pi}{n+1} \xrightarrow{n \to \infty} 0$. Also folgt mit Taylorentwicklung 2. |
|
|
|
Ordnung |
|
|
|
\[ |
|
|
|
\frac{2}{1 - \cos\left( \frac{\pi}{n+1} \right) } |
|
|
|
= \frac{2}{1 - \left( 1 - \frac{\pi^2}{2 (n+1)^2} + \mathcal{O}\left(\frac{\pi^{3}}{(n+1)^{3}}\right)\right) } |
|
|
|
\quad \stackrel{\frac{\pi}{n+1} \ll 1}{\approx} \quad \frac{2}{\frac{\pi^2}{2 (n+1)^2}} |
|
|
|
= \frac{4 (n+1)^2}{\pi^2} |
|
|
|
.\] Damit folgt |
|
|
|
\begin{align*} |
|
|
|
\lim_{n \to \infty} \frac{2}{1 - \cos\left( \frac{\pi}{n+1} \right) } \cdot \frac{1}{n^2} |
|
|
|
\approx |
|
|
|
\lim_{n \to \infty} \frac{4n^2 + 8n + 4}{\pi^2 n^2} |
|
|
|
= \frac{4}{\pi^2} < \infty |
|
|
|
.\end{align*} |
|
|
|
Damit folgt $\text{cond}_2(T) = \mathcal{O}(n^2)$. |
|
|
|
\end{proof} |
|
|
|
\end{enumerate} |
|
|
|
\end{aufgabe} |
|
|
|
|
|
|
|
\begin{aufgabe} |
|
|
|
\begin{enumerate}[a)] |
|
|
|
\item Es sei |
|
|
|
\begin{align} |
|
|
|
A^{(k)} &= \begin{gmatrix}[b] R_{11}^{(k)} & R_{12}^{(k)} \\ |
|
|
|
0 & B^{(k)}\end{gmatrix} |
|
|
|
\intertext{mit} |
|
|
|
B^{(k)} &= \begin{gmatrix}[b] \alpha ^{(k)} & (w^{(k)})^{T} \\ |
|
|
|
\sigma ^{(k)} & C^{(k)} |
|
|
|
\end{gmatrix} |
|
|
|
.\end{align} |
|
|
|
wobei $C^{(k)} \in \R^{(n-k-1)\times (n-k-1)}$ und |
|
|
|
$\sigma ^{(k)}, w^{(k)} \in \R^{n-k-1}, \alpha ^{(k)} \neq 0$. |
|
|
|
Da $\alpha ^{(k)} \neq 0$, ist die Pivotisierung bereits |
|
|
|
durchgeführt oder nicht notwendig. Es gilt damit nach VL |
|
|
|
\begin{align} |
|
|
|
A^{(k+1)} = A^{(k)} - l^{(k+1)}(u^{(k+1)})^{T} |
|
|
|
.\end{align} |
|
|
|
mit |
|
|
|
\[ |
|
|
|
l^{(k+1)}_i = \begin{cases} |
|
|
|
0 & 1 \le i \le k \\ |
|
|
|
\frac{a_{i,k}^{(k)}}{a_{k,k}^{(k)}} & k+1 \le i \le n |
|
|
|
\end{cases} \text{ und } |
|
|
|
u_j^{(k+1)} = \begin{cases} |
|
|
|
0 & 1 \le j \le k \\ |
|
|
|
a_{k,j}^{(k)} & k \le j \le n |
|
|
|
\end{cases} |
|
|
|
.\] |
|
|
|
Mit (2) folgt damit |
|
|
|
\begin{align*} |
|
|
|
l^{(k+1)} = \begin{gmatrix}[b] 0 \\ \frac{1}{a_{k,k}^{(k)}} \sigma ^{(k)} |
|
|
|
\end{gmatrix} |
|
|
|
\text{ und } |
|
|
|
u^{(k+1)} = \begin{gmatrix}[b] 0 & (w^{(k)})^{T} \end{gmatrix} |
|
|
|
.\end{align*} |
|
|
|
Mit (1) und (3) folgt somit |
|
|
|
\begin{align*} |
|
|
|
A^{(k+1)} &= A^{(k)} - \begin{gmatrix}[b] 0 & 0 & 0\\ |
|
|
|
0 & 0 & 0 \\ |
|
|
|
0 & 0 & \frac{1}{\alpha ^{(k)}} \sigma ^{(k)} (w^{(k)})^{T} \end{gmatrix} |
|
|
|
\intertext{Für $B^{(k+1)}$ gilt damit} |
|
|
|
B^{(k+1)} &= C^{(k)} - \frac{1}{\alpha ^{(k)}} \sigma ^{(k)} (w^{(k)})^{T} |
|
|
|
.\end{align*} |
|
|
|
\item Der Algorithmus führt die Gauß-Elimination zeilenweise durch. Dabei wird für Zeile $i$ |
|
|
|
folgendermaßen verfahren: |
|
|
|
|
|
|
|
\begin{enumerate}[1)] |
|
|
|
\item Für jede Spalte, die nicht rechts der Diagonale ist, wird |
|
|
|
zunächst das $i$-te Element des $l^{(j)}$-Vektors berechnet. |
|
|
|
\[ |
|
|
|
l_i^{(j)} = a_{i,j-1} = \frac{a_{i,j-1}}{a_{j-1,j-1}} |
|
|
|
.\] Das Element $a_{j-1, j-1}$ ist das Pivotelement des $j$-ten Schritts |
|
|
|
der LU Zerlegung aus der VL. |
|
|
|
|
|
|
|
In der Schleife für $k$, werden dann für $a_{i,j}$ sukzessiv alle Rang-1-Updates |
|
|
|
ausgeführt, der bis dahin berechneten $l^{(k)}_i$. |
|
|
|
\item Die Elemente in den Spalten rechts der Diagonale sind keine Pivotelemente. Deshalb |
|
|
|
werden hier direkt die Rang-1-Updates $l_i^{(1)}$ bis $l_i^{(i-1)}$, die |
|
|
|
links der Diagonale stehen, ausgeführt. |
|
|
|
\end{enumerate} |
|
|
|
Damit ist die Zeile $i$ auf die finale Form gebracht und es wird mit $i+1$ weitergemacht. |
|
|
|
\end{enumerate} |
|
|
|
\end{aufgabe} |
|
|
|
|
|
|
|
\begin{aufgabe} |
|
|
|
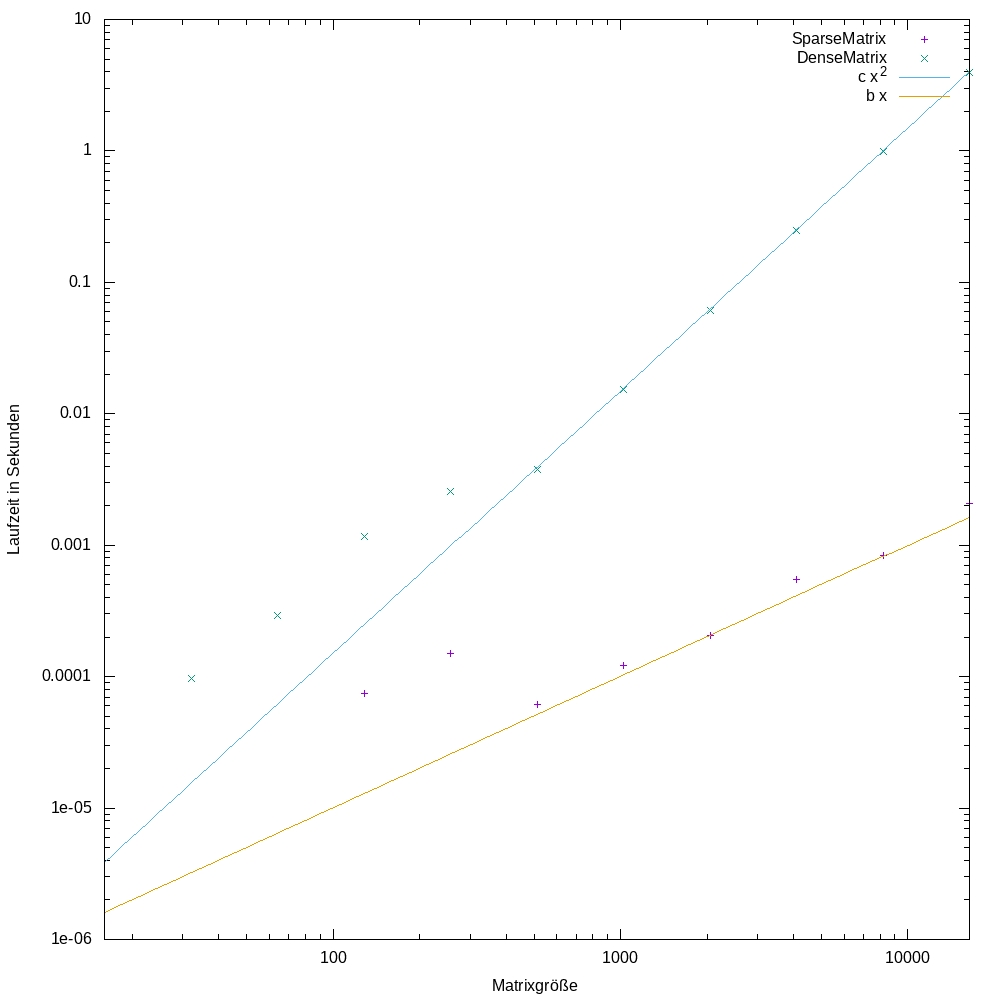
Implementierung siehe \textit{prog\_sparse\_matrix.cc}. Plot in \textit{sparse\_plot.png}. |
|
|
|
|
|
|
|
Die Komplexität in der \lstinline{DenseMatrix} Variante ist wie zu erwarten $\mathcal{O}(N^2)$ und |
|
|
|
die Komplexität der \lstinline{SparseMatrix} Variante $\mathcal{O}(N)$, da |
|
|
|
die Anzahl der Nicht-Null Elemente der verwendeten Flussmatrix aus dem Rohrleitungsnetzwerk |
|
|
|
linear ansteigt. |
|
|
|
\end{aufgabe} |
|
|
|
|
|
|
|
\end{document} |


{kind=link}